Hello, I am trying to pick out a new autopilot for a 40’ motorsailer.
I have been looking at the Raymarine EV400 with a p70R control head and Evolution sensor core.
I want to know if anyone has successfully interfaced CE with the Raymarine hardware for programming waypoints etc in regards to controlling an autopilot?
I have found several posts on the web but no recent info.
I am very ignorant about the 0183 and 2000 language and so most of the conversations go way over my head.
I called Raymarine and the tech told me it can’t be done.
If anyone can steer me a bit I would appreciate it
Thanks
Hello,
Looking at the manual for the P70R, It appears that the unit can receive the following NMEA2000 PGNs:
129283: Cross Track Error 129284: Navigation Data 127258: Magnetic Variation 129025: Position, Rapid Update 129026: COG & SOG, Rapid Update
These are 5 of the 6 PGNs Coastal Explorer can output onto the NMEA2000 network to control your autopilot.
The sixth PGN, which I do not see in the P70R manual is 129285: Navigation - Route/WP information.
You would want to double check with Raymarine to see if their autopilot can be controlled by Coastal Explorer using only the 5 PGNs mentioned above or if the lack of the P70R’s ability to receive the “129285: Navigation - Route/WP information” PGN would prevent control.
Hello Bonesd,
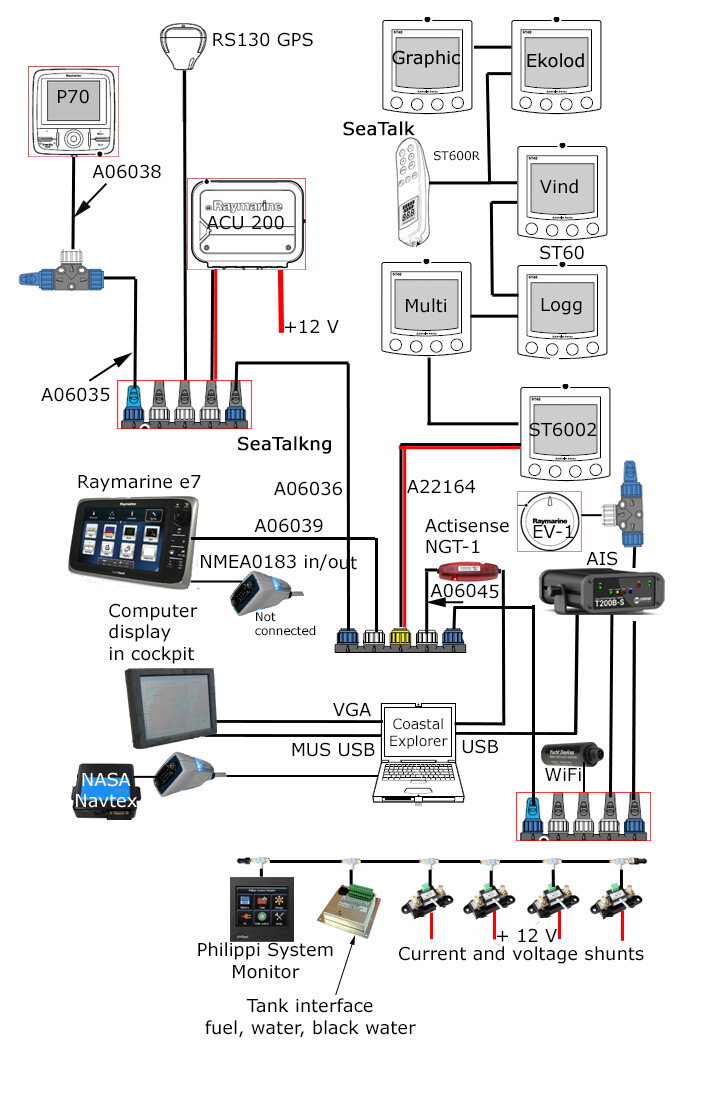
I have been using an EV200 autopilot together with Windows CE since 2014 with full functionality. CE controls the autopilot according to the route or wpt. My control unit is a P70. You need a STng cable A06045 and a NMEA 2000 - USB gateway (I use Actisense NGT-1) to connect your Windows PC to your STng network. Look at the attached system diagram. Don’t care about the SeaTalk part of the diagram.
The setup in CE is simple and I am sure CE support can guide you.
Jan
Initially I had some problems interfacing CE with a Raymarine EVO, associated with multiple track messages being sent by a Garmin MFD, a Raymarine a67, and CE. Software patches over time see to have corrected this, so I can now send a route from CE, a Garmin 4212, or a Raymarine a67 to the EVO. On rare occasions the EVO gets confused about the source of valid track messages over the NMEA 2000 network and when trying to engage a track on the P70R, you will get an alarm for no track data. The easy way out of that is to reboot the EVO (turn it off and back on). Don’t get confused about the SeaTalkNG network interface to NMEA 2000. Except for the connector on SeaTalkNG, there is no difference. You can buy the Raymarine adapter cable or simply cut the connector off the SeaTalkNG cable and replace it with a Maretron NMEA 2000 connector (remember there are male and female connectors depending where you are connecting to the network). The wire colors and pinouts are the same. I have used both the NEMO gateway and the Actisense NMEA 2000 USB interface to connect to the NMEA 2000 network from the computer running CE.
The EVO works very well with CE. I have navigated some very narrow passages using a CE route sent to the EVO as an experiment. It navigated the route as well as I could manually steer with one exception. When you get to a waypoint that requires a turn, it will ask you to acknowledge the waypoint coming up and begin the turn early so that at the way point will be on the new heading. If you set the waypoint past where you want to turn, it works fine. I was dealing with a channel that was about 60 feet wide, so when to turn was critical. So if you want to turn at a buoy, set the waypoint a little past the buoy.